分块环形阵列的一些基本特性
Study on Sectored Circular Arrays
Published:
今天我们一篇关于分扇区的环形阵列的工作在Globecom展示,收获了许多专家学者的建议,我们对此表示衷心的感谢。该工作的可复现仿真与演示文稿可以在我们的GitHub上公开获取。
背景
近场相关的工作近年来已经越来越多,相信此处我们不需要提供过多的背景介绍。不过大部分的工作都是基于线性(或者平面)阵列的,而实际上平面阵列在许多问题上并不能达到最优。在一些近场通信的研究中我们不难找到,近场信道的角度和距离这两个参数的估计误差并不相同1,如图
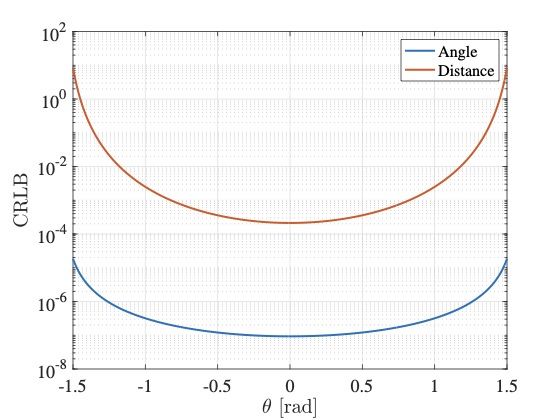
这个图主要展示了两种缺陷,首先线性阵列在两侧可能出现“崩边”现象,边缘分辨率随着等效孔径剧烈崩溃;其次,距离估计的误差可能远高于角度估计,即使角度估计精准,距离误差也会导致定位失误。出现这个现象可以理解为线性阵列的空间特性,因此我们或许应该考虑尝试其他阵列结构。
目前也有一些其他工作在考虑环形阵列的可能应用,除了我在文章intro部分提出的问题之外,实际上还有QMUL Zhaolin Wang等人的工作,值得学习。
💡 会后咨询了一位在华为的研究员,他表示目前无论是非均匀还是非线性的天线,都有比较高的制作难度,目前来看商用的机会还不大。
技术说明
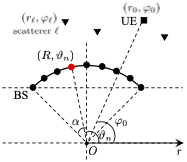
本文假设的系统模型非常简单,一个分扇区的环形阵列与近场区用户,环境内存在若干散射体。
这里的接收信号模型可以表示为
这个信号也可以说是“波前(wavefront)”。其中距离项我们会做简单的近似如下
被记录的波前可以被用于反向电磁传播模拟如下
其中第一个算式里面的Propag.用于模拟电磁传输。这个函数也被称为模糊函数,用于描述重建的分辨率。
对于这个模糊函数我们有两个基本结论。这可以在我们的期刊版论文2中找到,主要可以概括为
- 模糊函数只在目标坐标位置取最大值。
- 模糊函数在特定的渐进条件下趋近于\(0\),从而产生干净的重建结果。
如图所示的重建例子可以很好地说明这一点
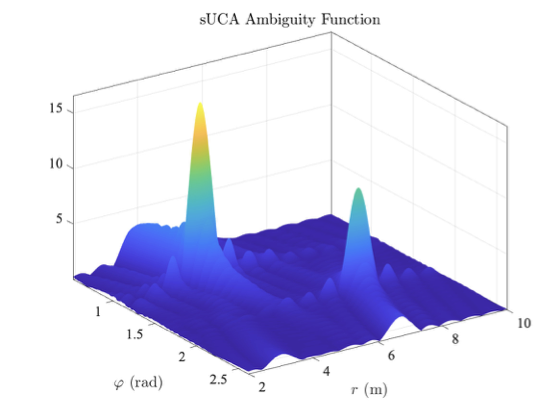
这个重建的过程实际上可以转化为卷积运算,从而让我们可以使用快速傅里叶变换来实现快速重建。
简要结论
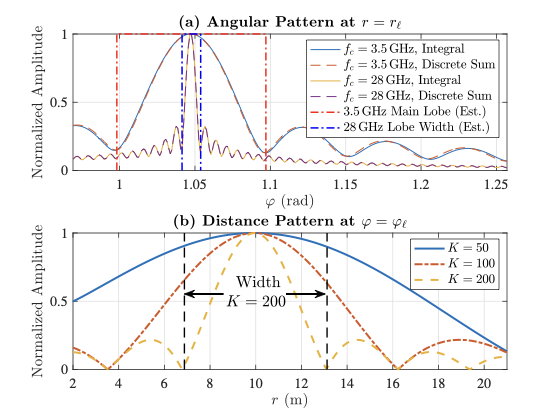
经过对模糊函数的分析,我们容易证明,环形结构的阵列能够实现较好的边缘分辨率,实际上,是平稳的分辨率过渡————角度分辨率几乎与位置无关。
对于距离分辨率,结果实际上并没有令人满意。环形阵列的距离分辨率与线性阵列相似————在BP算法下都没有距离分辨率。
此外,环形阵列由于采用和线性阵列相同的总孔径,性能的优势并不显著。环形阵列的等效孔径将远小于线性阵列,因此角度分辨率实际低于线性阵列,至少在正前方位置。这样的结果还导致了近场范围的缩小,这使得拥有高自由度的区域剧烈收缩,影响通信效率。
Zhaolin的工作则考虑了等效孔径相同,因此环形阵列的性能优势可以完全凸显。经过仿真我们容易知道间距较大的时候环形阵列的sidelobe仍然是可接受的,因此在这种情况下考虑环形阵列十分合适。
我对我固执于相同孔径的意见有些后悔,也十分推荐这篇让我意识到这一点的论文。
部分仿真结果
 | 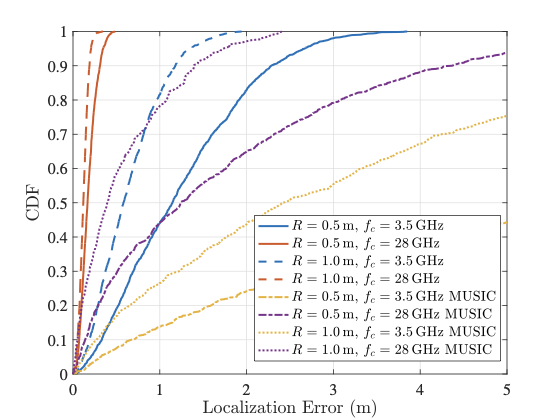 |
如有问题记得邮箱联系:-)
参考文献
H. Wang, Z. Xiao and Y. Zeng, “Cramér-Rao Bounds for Near-Field Sensing With Extremely Large-Scale MIMO,” IEEE Transactions on Signal Processing, vol. 72, pp. 701-717, 2024. ↩
Shicong Liu, Xianghao Yu, Zhen Gao, Jie Xu, Derrick Wing Kwan Ng, Shuguang Cui, “Sensing-Enhanced Channel Estimation for Near-Field XL-MIMO Systems”, IEEE J. Sel. Areas Commun. ↩